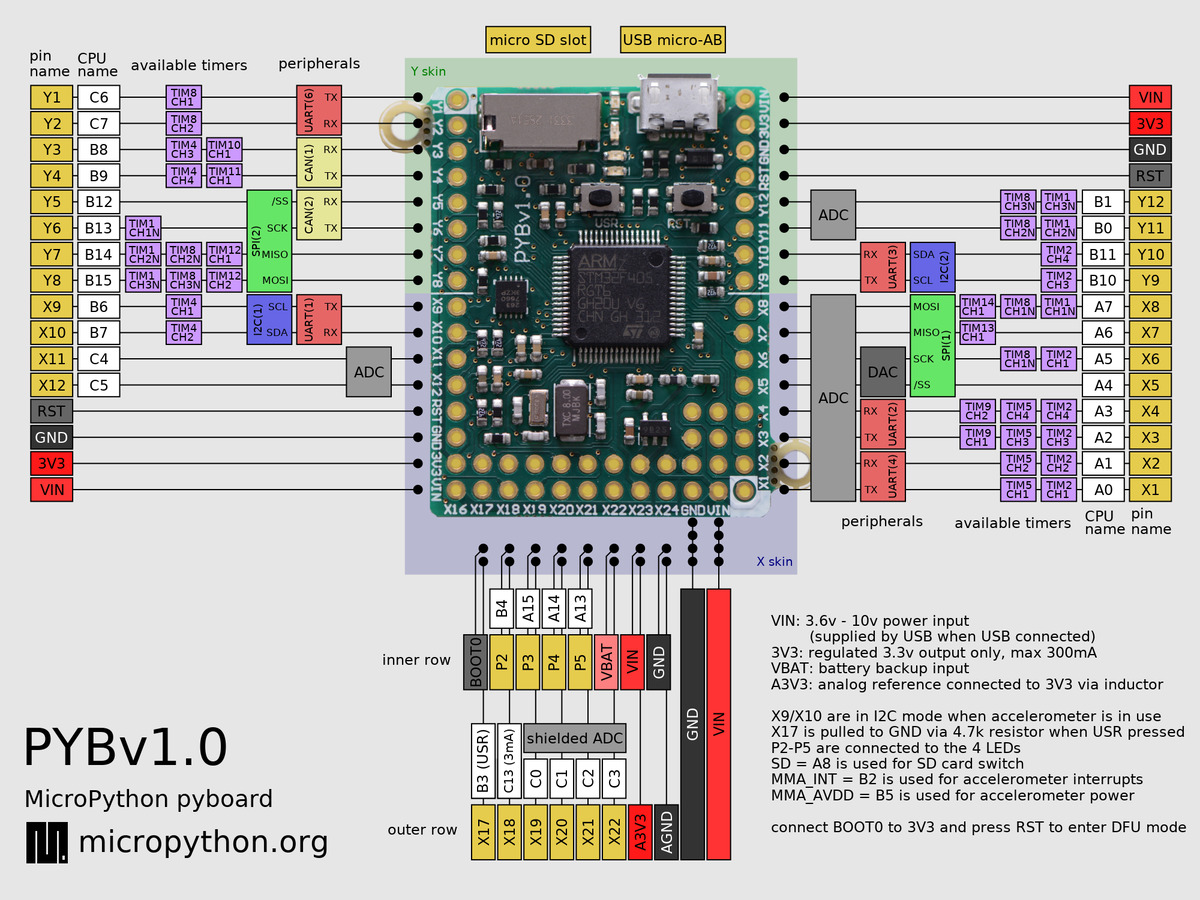
Краткое описание микроконтроллера pyboard¶
Основные команды микроконтроллера¶
Подробнее pyb.
import pyb
pyb.delay(50) # ожидание 50 миллисекунд
pyb.millis() # количество миллисекунд с момента запуска
pyb.repl_uart(pyb.UART(1, 9600)) # duplicate REPL on UART(1)
pyb.wfi() # pause CPU, waiting for interrupt
pyb.freq() # получить частоты центрального процессора и магистрали
pyb.freq(60000000) # установить частоту центрального процессора 60MHz
pyb.stop() # остановка центрального процессора, ожидание внешнего прерывания
Светодиоды (LEDs)¶
Подробнее pyb.LED.
from pyb import LED
led = LED(1) # красный светодиод
led.toggle()
led.on()
led.off()
Пины и интерфейсы ввода/вывода (GPIO)¶
Подробнее pyb.Pin.
from pyb import Pin
p_out = Pin('X1', Pin.OUT_PP)
p_out.high()
p_out.low()
p_in = Pin('X2', Pin.IN, Pin.PULL_UP)
p_in.value() # получить значение, 0 или 1
Внешние прерывания¶
Подробнее pyb.ExtInt.
from pyb import Pin, ExtInt
callback = lambda e: print("intr")
ext = ExtInt(Pin('Y1'), ExtInt.IRQ_RISING, Pin.PULL_NONE, callback)
Таймеры¶
Подробнее pyb.Timer.
from pyb import Timer
tim = Timer(1, freq=1000)
tim.counter() # получить значение счётчика
tim.freq(0.5) # 0.5 Hz
tim.callback(lambda t: pyb.LED(1).toggle())
Широтно-импульсная модуляция (PWM)¶
Подробнее pyb.Pin и pyb.Timer.
from pyb import Pin, Timer
p = Pin('X1') # X1 это TIM2, CH1
tim = Timer(2, freq=1000)
ch = tim.channel(1, Timer.PWM, pin=p)
ch.pulse_width_percent(50)
Конвертация аналогового в цифровой (ADC)¶
from pyb import Pin, ADC
adc = ADC(Pin('X19'))
adc.read() # прочитать значение, 0-4095
Конвертация цифрового в аналоговый (DAC)¶
from pyb import Pin, DAC
dac = DAC(Pin('X5'))
dac.write(120) # вывод от 0 до 255
Универсальный асинхронный приёмопередатчик (UART)¶
Подробнее pyb.UART.
from pyb import UART
uart = UART(1, 9600)
uart.write('hello')
uart.read(5) # читать 5 байт
Интерфейс системного программированния (SPI)¶
Подробнее pyb.SPI.
from pyb import SPI
spi = SPI(1, SPI.MASTER, baudrate=200000, polarity=1, phase=0)
spi.send('hello')
spi.recv(5) # получить 5 байт из шины
spi.send_recv('hello') # send a receive 5 bytes
Интерфейсная шина IIC (I2C)¶
Подробнее pyb.I2C.
from pyb import I2C
i2c = I2C(1, I2C.MASTER, baudrate=100000)
i2c.scan() # возвращает список ведомых адресов
i2c.send('hello', 0x42) # отправить 5 байт для ведомого устройства с адресом 0x42
i2c.recv(5, 0x42) # получить 5 байт от ведомого устройства
i2c.mem_read(2, 0x42, 0x10) # прочитать 2 байта от ведомого устройства 0x42, ведомого устройства памяти 0x10
i2c.mem_write('xy', 0x42, 0x10) # написать 2 байта ведомому устройству 0x42, 0x10 ведомого устройства памяти